Un robot lunare da 100 kg presentato come un operaio edile: la Cina ha appena svelato una macchina semi-umanoide pensata per lavorare sulla Luna con strumenti… progettati per esseri umani.
L’idea non è solo rotolare e fotografare sassi, ma manipolare, installare, riparare, insomma fare logistica e manutenzione sul posto. Il robot è annunciato per un primo vero battesimo del fuoco durante Chang’e-8, missione attesa verso la fine degli anni 2020. Combina una base su ruote e due braccia, con una promessa semplice: evitare di ridisegnare tutta una panoplia di attrezzature per pinze da rover, adattando piuttosto il robot agli standard già pensati per mani e avambracci di astronauta.
Chang’e-8 dovrà testare un robot da 100 kg sulla Luna
Lo scenario proposto è concreto: una volta a terra il modulo, il robot si dispiega e fa da portatore, installatore e assistente tecnico. È dato per il trasporto di strumenti, il posizionamento di sensori in punti precisi e il contributo a operazioni di costruzione e manutenzione. Su una superficie in cui ogni uscita umana costa cara e resta rischiosa, l’interesse è evidente, anche se la promessa dovrà reggere al freddo, alla polvere e alle ombre molto marcate.
Ciò che cambia è l’obiettivo delle missioni. Per lungo tempo la Luna ha fatto rima soprattutto con osservazione e raccolta di campioni. Qui l’ambizione dichiarata scivola verso un cantiere d’ingegneria, con compiti ripetitivi e utili come spostare materiale, fissare elementi, verificare un’installazione o recuperare campioni senza monopolizzare un astronauta. Il robot è annunciato come AI-assisted, un punto chiave per gestire compiti semi-autonomi nonostante i ritardi di comunicazione.
Va comunque tenuta una sfumatura: inviare un robot generalista è più difficile che dispiegare una macchina specializzata. Un rover progettato solo per spostarsi e misurare può essere blindato, semplificato, ottimizzato. Un robot che deve manipolare oggetti vari, talvolta mal posizionati, deve gestire l’imprevisto. E sulla Luna l’imprevisto è la norma. Se la demo di Chang’e-8 si limiterà a pochi gesti semplici, sarà già una tappa, ma non ancora una garanzia di cantiere autonomo.
Una base a quattro ruote e due braccia per manipolare strumenti
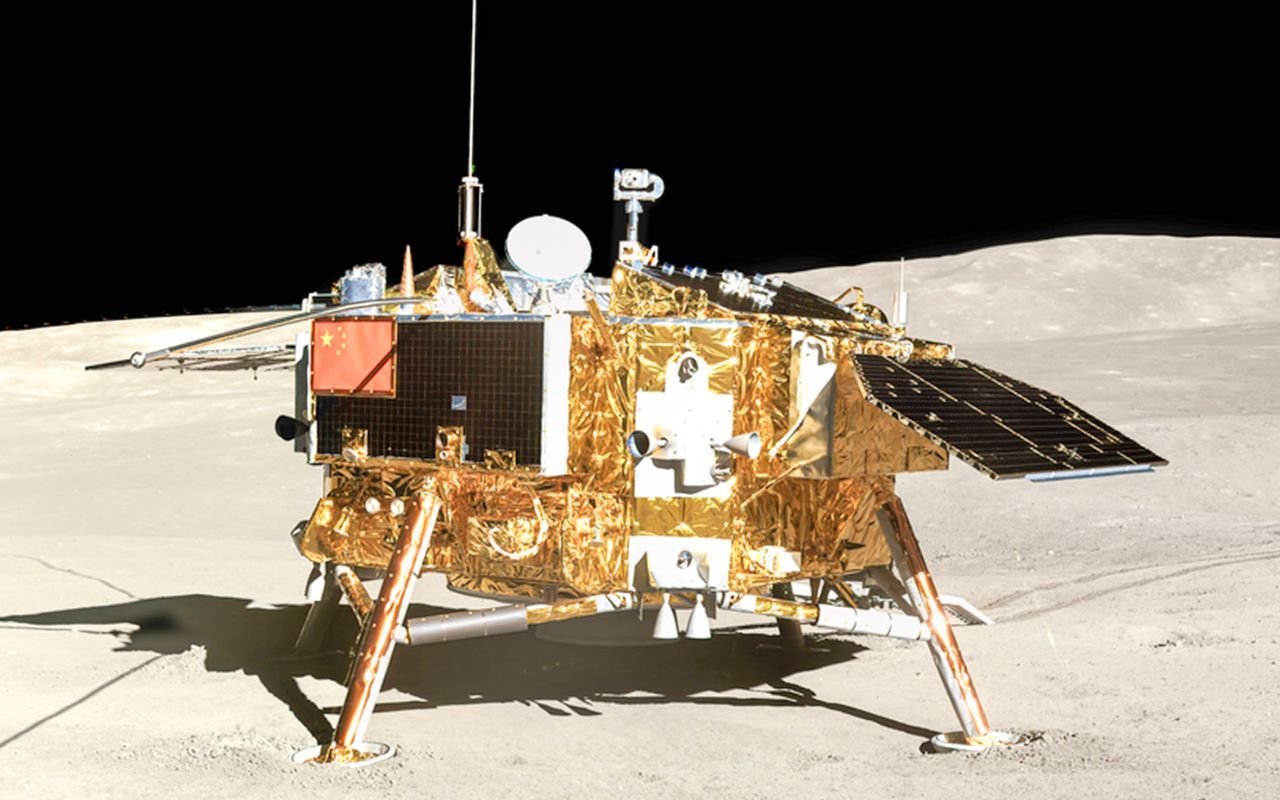
Il robot combina una piattaforma a 4 ruote e una parte superiore umanoide con due braccia. La scelta delle ruote è presentata come un compromesso pragmatico: più rapido e più stabile di una camminata bipede, con una migliore efficienza energetica per attraversare un terreno irregolare. In chiaro, si evita la dimostrazione spettacolare del robot che cammina come noi e si privilegia un veicolo che arriva in orario sul luogo di lavoro.
La destrezza viene dalla parte superiore del corpo. Le descrizioni tecniche parlano di un busto capace di ruotare ampiamente e di una mano con più gradi di libertà per manipolazioni precise. L’obiettivo è tenere, orientare e azionare strumenti già progettati per gli astronauti, quindi per un’ergonomia umana. Questo dettaglio è tutt’altro che marginale: se un programma spaziale ha già interfacce, maniglie, connettori e procedure pensate per guanti pressurizzati, rifare tutto quel catalogo per un robot costa tempo e denaro.
Si vede la scommessa industriale: costruire un robot che si inserisca nell’esistente. Ad esempio, anziché creare un cacciavite versione rover, si vuole un robot capace di afferrare una maniglia, stabilizzare un oggetto, posizionarlo, poi ripetere l’operazione senza fatica. Ma c’è un rovescio della medaglia: più la macchina è polivalente, più la validazione è pesante. Sulla Terra, uno strumento male tenuto è un oggetto che cade. Sulla Luna, uno strumento perso nella polvere può fermare un’intera operazione.
La Cina punta a una base lunare all’orizzonte 2035
Questo annuncio si inserisce in un calendario più lungo: una base lunare cinese viene evocata con un orizzonte 2035. In questa prospettiva, un robot operaio non è un gadget, è un mattone metodologico. Prima di installare attrezzature durature, occorre essere capaci di fare movimentazione, assemblaggio, ispezioni e riparazioni, con una regolarità che gli equipaggi umani non possono assicurare in continuo.
Il confronto con altri approcci aiuta a capire. La NASA, ad esempio, lavora su veicoli infrastrutturali come l’IPEx, un escavatore robotizzato pensato per spostare grandi quantità di regolite, fino a 10.000 kg in una giornata lunare secondo la presentazione del concept. È l’altra scuola: una macchina specializzata, dedicata allo scavo e al trasporto di materia. Il robot cinese punta invece alla polivalenza dell’officina, con braccia capaci di manipolare oggetti vari.
Esiste anche un precedente lato umanoide: Robonaut, sviluppato con General Motors, è stato inviato sulla Stazione Spaziale Internazionale nel 2011. La lezione è che la forma umanoide serve soprattutto quando l’ambiente è progettato per l’uomo. Sulla Luna, l’ambiente resta da costruire, quindi il dibattito è aperto: occorre adattare il mondo al robot, o adattare il robot al mondo già pensato per gli astronauti? La Cina sembra scegliere la seconda opzione, almeno per accelerare le prime tappe.
Da ricordare
- La Cina ha presentato un robot lunare da 100 kg progettato per usare strumenti umani.
- Il robot, a quattro ruote e due braccia, è previsto per la missione Chang’e-8 alla fine degli anni 2020.
- L’obiettivo dichiarato copre movimentazione, installazione di sensori, manutenzione e supporto a lavori infrastrutturali.
- Questa logica si inserisce in una traiettoria verso una base lunare annunciata all’orizzonte 2035.
Fonti
- China unveils 220-pound robot ‘construction worker’ to use human tools on moon | robot.tv News
- China unveils 220-pound robotic porter to use human tools on moon
- China unveils 220-pound lunar robotic porter | Let’s Data Science
- This weird-looking humanoid robot could help China conquer the moon: scientists | South China Morning Post
- Infrastructure Pilot Excavator